11月30日,我院PMCIRI实验室研制的GIS检修机器人成功实现又一次现场应用,辅助开展灭弧室内部检查,顺利完成辽宁张台变电站500千伏某线HGIS设备抢修工作并成功送电,大幅缩短检修时间,为GIS设备的智能运维注入新的活力。
PMCIRI实验室是由我院佃松宜教授领衔、专任教师近十位,工程技术人员近三十位、硕博士研究生五十余位,聚焦电力能源行业运维机器人研究开发与应用的科研机构。近年来在国家重点研发计划、国网总部项目、中广核尖峰计划等国家和行业重点项目支持下,已累计研制形成变压器潜油检查机器人、核电蒸汽发生器检查机器人、GIS腔体检修机器人等十余种面向电力能源行业关键设备运维的特种机器人技术及产品,在电力能源行业智能运维机器人领域有鲜明特色和较大影响。

随着智能电网建设要求提升,气体绝缘开关设备(GIS)运维成为关键挑战。现有GIS设备故障率飙升,传统检测手段无法定位故障源,导致设备拆解、运维时间长,尤其灭弧室更是对洁净度要求非常高且极难检修。为解决此问题,迫切需要研制适用于GIS设备的智能机器人技术。这种机器人可携带传感器进入GIS腔体,实现自动检测、清理异物,提高设备运行效率,符合时代发展趋势。
检修作业时,由人工打开一侧的端盖或手孔盖,放入机器人后即可临时封堵,由机器人在内独自完成检修作业。

GIS检修机器人采用了移动本体耦合柔性臂的结构形式,本体采用轻量化柔性材料,整体尺寸严格控制,能够适用于220KV及以上等级的GIS罐体。能够实现对罐体底部导电柱、灭弧室内部进行视频检查、异物检测、分类及清理作业任务。
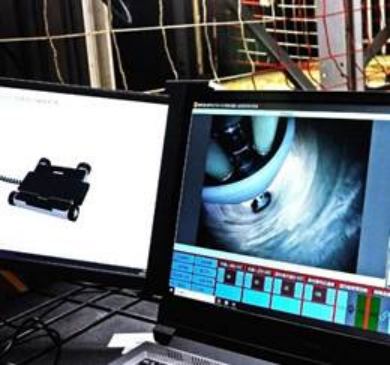
机器人采用遥控操作与自主相结合的方式,操作人员可以通过多路视频对内部情况进行观察,从而对内部异物情况、紧固件连接状态作全方位检查,且机器人依靠多传感融合实现腔内感知、定位和建图功能,实现对坑洞的避障。
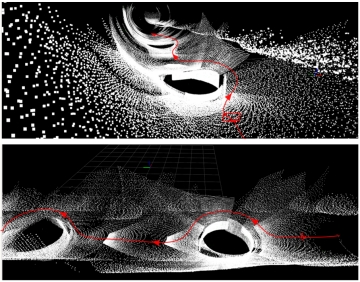
通过对环境采集图像进行检测分类,能够获取详细故障信息及类别。为实现对机器人本体的感知和交互友好性,能够在所建立的数字孪生体中建立虚拟模型并实时同步状态,防止对罐体内部造成损伤。
机器人本体与罐体接触部位均采用柔性化处理,包括行进轮、柔性臂外包裹等。通过上述方式,能有效避免对罐体内部元器件的损伤。

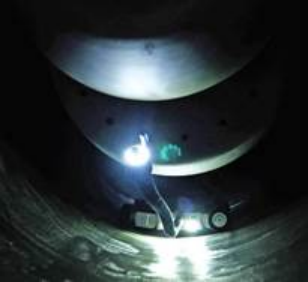
在恶劣天气条件下,风力强劲且气温降至零下10摄氏度,对于现场人工检修和机器人稳定性都带来了挑战。尽管如此,GIS检修机器人仍以高效迅速的表现,仅用不到半小时完成了对500千伏灭弧室内连接结构和异物状态的全面检查。这次成功的检查不仅消除了灭弧室异常可能性,也为故障定位和下一步检修提供了关键指引。


在科技创新的引领下,PMCIRI实验室将继续推广电力作业机器人在设备维护中的应用。我们致力于为电网关键设备引入智能机器人化运检,推动电力作业机器人技术的创新发展。

 206游艇会电气工程学院
206游艇会电气工程学院
